En attendant les vraies voitures autonomes, les véhicules actuels sont déjà équipés de systèmes semi-autonomes, capables de prendre le contrôle en cas de danger.
Une grande partie des voitures proposent désormais un mécanisme de freinage d'urgence : des radars détectent un obstacle sur le route et -si besoin- active le freinage à une distance suffisante pour s'arrêter à temps. Le prestigieux Touring Club Suisse (TCS) a ainsi testé trois systèmes différents sur trois véhicules :
1. VW up! avec capteur LiDAR Le capteur LiDAR est un simple système de freinage d'urgence sans avertissement sonore. Il fonctionne jusqu'à 30 km/h. Le LiDAR ne repère que la distance par rapport à des obstacles, mais ne reconnaît pas des piétons.
2. Seat Ateca avec capteur radar Le capteur radar de Seat est un assistant de freinage d'urgence qui intervient également à des vitesses plus élevées. Le radar identifie des piétons à leur profil de mouvement typique.
3. Subaru Outback avec caméra stéréo (EyeSight) La caméra stéréo assure une vision spatiale. Grâce à la reconnaissance d'images en stéréo, le système identifie aussi bien des obstacles immobiles que des piétons.
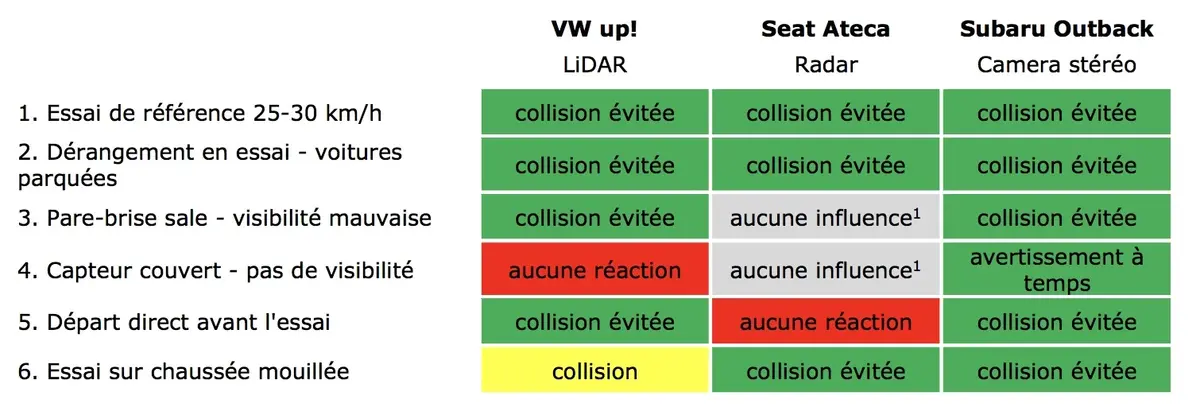
L'idée était à la fois de tester l'efficacité des différents systèmes, mais surtout leur fiabilité en cas de dysfonctionnement ou de mauvaises conditions. Par exemple, si le pare-brise est sale, si le capteur est couvert, si la chaussée est mouillée... A ce petit jeu, seul la Subaru et sa caméra ont été en mesure de prévenir le conducteur lorsque le capteur n'était pas fonctionnel. Chez Seat et Volkswagen, certaines situations (chaussée mouillée, capteur couvert, départ direct...) n'ont pas été pris en compte et ont parfois conduit à une collision :
Bref, même avec un système plutôt simple de détection d'obstacle, la machine reste donc encore largement perfectible, surtout lorsqu'on vient perturber les capteurs intentionnellement.